This displays the Raspberry Pi 4 export wizard.
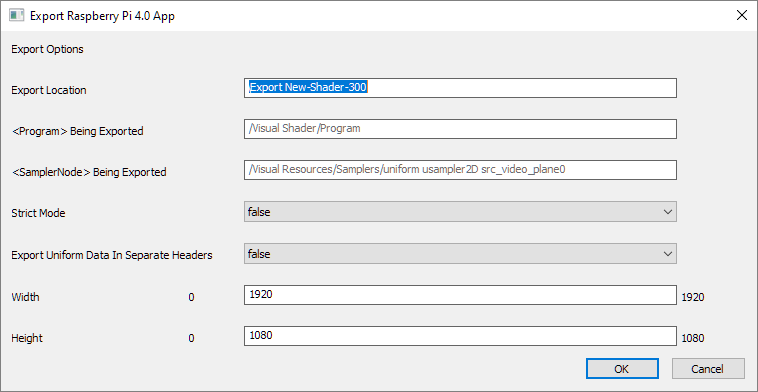
For now, you don't need to worry about these options, as we can use the defaults.
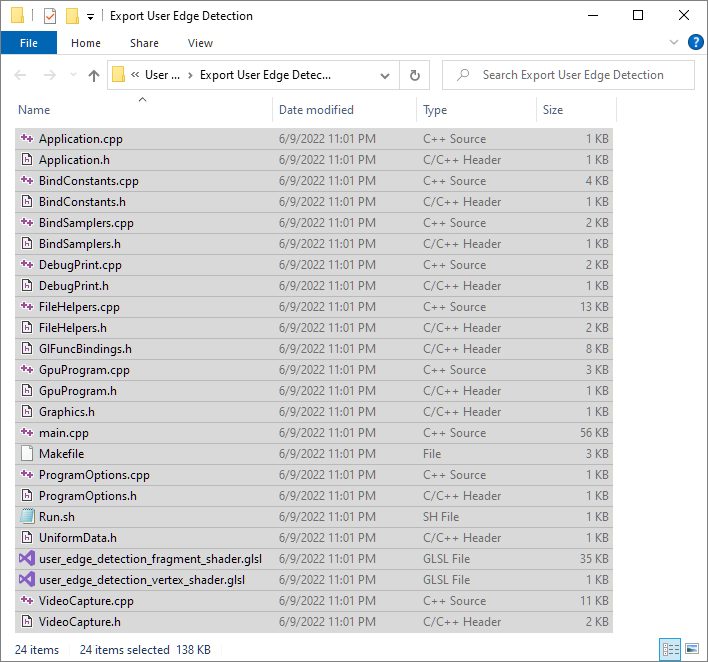
The software generates a framework for a small C++ application and opens a Windows® folder to the directory containing the exported files. Note that the export directory is simply a sub-directory of the directory that contains the shader document.
The following files are generated:
| File | Description |
|---|---|
| Application.cpp, Application.h | Implements a class Application that serves as the basic application object type. |
| BindConstants.cpp, BindConstants.h | Implements a class BindConstants that contains the OpenGL® function calls to set uniform values for the uniforms declared and used in your shader source code. |
| BindSamplers.cpp, BindSamplers.h | Implements a class BindSamplers that binds samplers on the GPU. In the case of exporting a video shader to the Raspberry Pi 4, we only bind a single sampler. |
| DebugPrint.cpp, DebugPrint.h | Contains a helper function that prints debug logging information to the Raspberry Pi 4 console. |
| FileHelpers.cpp, FileHelpers.h | Implements a class FileHelpers that loads files from disk. |
| GlFuncBindings.h | Implements a class GlFuncBindings that loads OpenGL® extensions required by the application. |
| main.cpp | Implements the main function for the application. |
| Makefile | Implements a build script. |
| ProgramOptions.cpp, ProgramOptions.h | Implements a class ProgramOptions that stores application settings such as video width, video height, and colorspace information. |
| Run.sh | Implements a script that runs the application. |
| UniformData.h | Implements static declarations that store values specified by <VariableNode> objects that represent uniforms. |
| user_edge_detection_fragment_shader.glsl | The fragment shader translation unit, which is the complete fragment shader after all #include statements have been processed. |
| user_edge_detection_vertex_shader.glsl | The vertex shader translation unit, which is the complete vertex shader after all #include statements have been processed. |
| VideoCapture.cpp, VideoCapture.h | Implements a class VideoCapture that manages video stream loading, buffering, and termination. |
The output window also contains a detailed log of the operations. Note that you can see whether variables were exported or not.
--- <Executing Command 'ExportShaderToTargetPlatform'> ---
Exporting : /Visual Shader/Program
Exporting vertex shader: D:\Release6\Content\Library\Shader\User Edge Detection\300\user_edge_detection_vertex_shader.glsl
Exporting fragment shader: D:\Release6\Content\Library\Shader\User Edge Detection\300\user_edge_detection_fragment_shader.glsl
Exporting to folder: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection
Exporting with display dimensions: 1920x1080
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\Application.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\Application.h
SSL::GenerateGlData. Exported <VariableNodegt;: uniform SPA_VideoParams SPA_Video
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\UniformData.h
SSL::GlSetUniformCall. Exported <VariableNodegt;: uniform SPA_VideoParams SPA_Video
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\BindConstants.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\BindConstants.h
SSL::GlSetUniformCall. Exported <VariableNode>: uniform usampler2D src_video_plane0
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\BindSamplers.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\BindSamplers.h
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\DebugPrint.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\DebugPrint.h
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\FileHelpers.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\FileHelpers.h
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\GpuProgram.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\GpuProgram.h
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\GlFuncBindings.h
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\Graphics.h
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\main.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\Makefile
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\ProgramOptions.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\ProgramOptions.h
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\Run.sh
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\VideoCapture.cpp
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\VideoCapture.h
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\user_edge_detection_vertex_shader.glsl
Exported to disk: D:\Release6\Content\Library\Shader\User Edge Detection\Export User Edge Detection\user_edge_detection_fragment_shader.glsl
Document export complete.
Next we'll need to copy these files to the hard disk on your Raspberry Pi 4 device.